国土交通省道路局、国土技術政策総合研究所およびNEXCO中日本は、自動運転インフラ検討会の関係省庁と連携し、自動運転トラックの実現に向けて、新東名高速の深夜時間帯に自動運転車優先レーンを設定し、自動運転サービス支援道による自動運転トラックの公道走行の実証実験を開始した。
先頭車輌は有人による運転で、それに複数台の自動運転トラックが追従する隊列走行の実証実験を経て、いよいよトラック単独での自動運転が開始されたのだ。
実験区間は、新東名高速の駿河湾沼津SA~浜松SA間で、実験を行う時間帯は22時から5時の深夜となっている。
高速道路の自動運転サービスに求められるインフラ支援とは、合流支援情報提供システム、先読み情報提供システム、道路と交通の管理、有人と自動運転の切替拠点、自動運転車優先レーンの5つの要素が挙げられている。
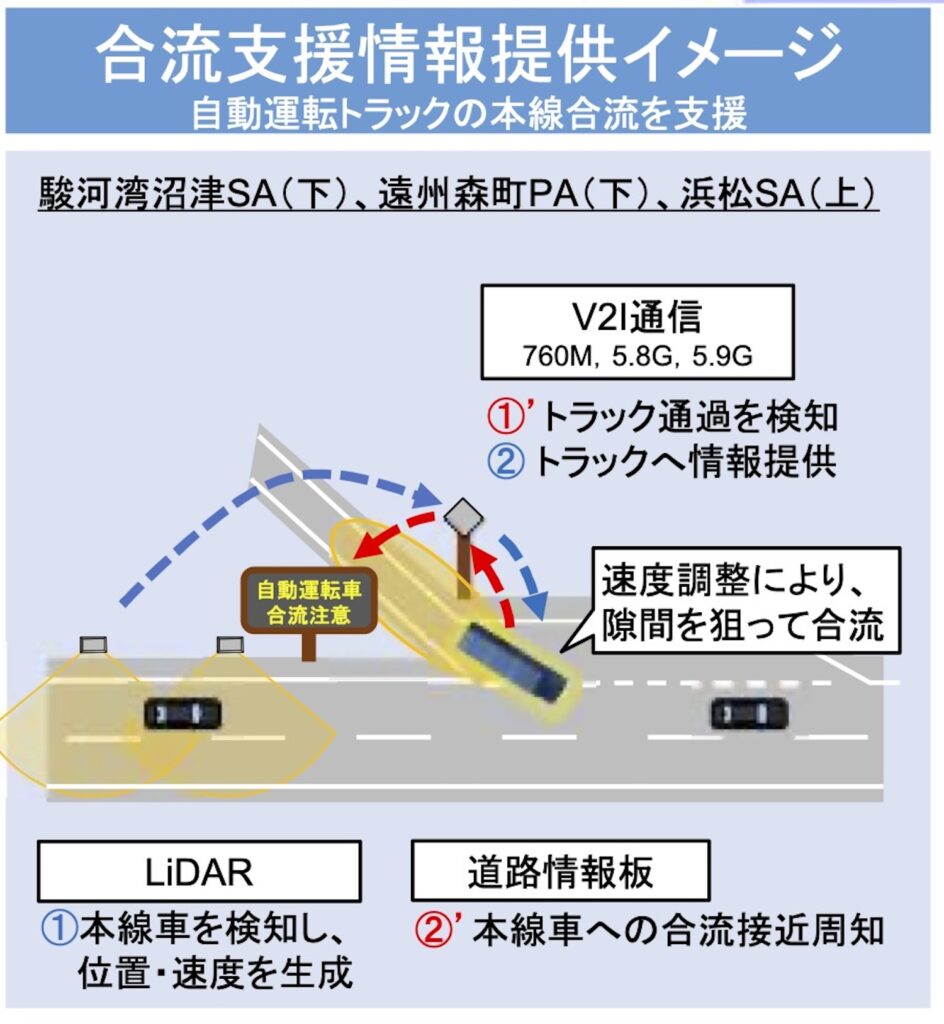
合流支援情報提供システムとは、自動運転車の本線合流を支援する情報を提供するもので、合流地点手前にLiDAR(レーザースキャナー)を設置して、他車の通行を検知して自動運転車に伝える。これにより、自動運転車の速度を調整して安全スムーズに合流することを支援すると共に本線を走行する車輌には道路情報板などにより自動運転車の合流を伝える役割をもつ。
先読み情報提供システムとは、落下物や工事規制、被合流や速度規制などを事前に知らせることで自動運転車の円滑な走行(事前の車線変更など)を支援する情報提供や、AIカメラや車輌データなどを活用した落下物などの早期自動検知が含まれる。
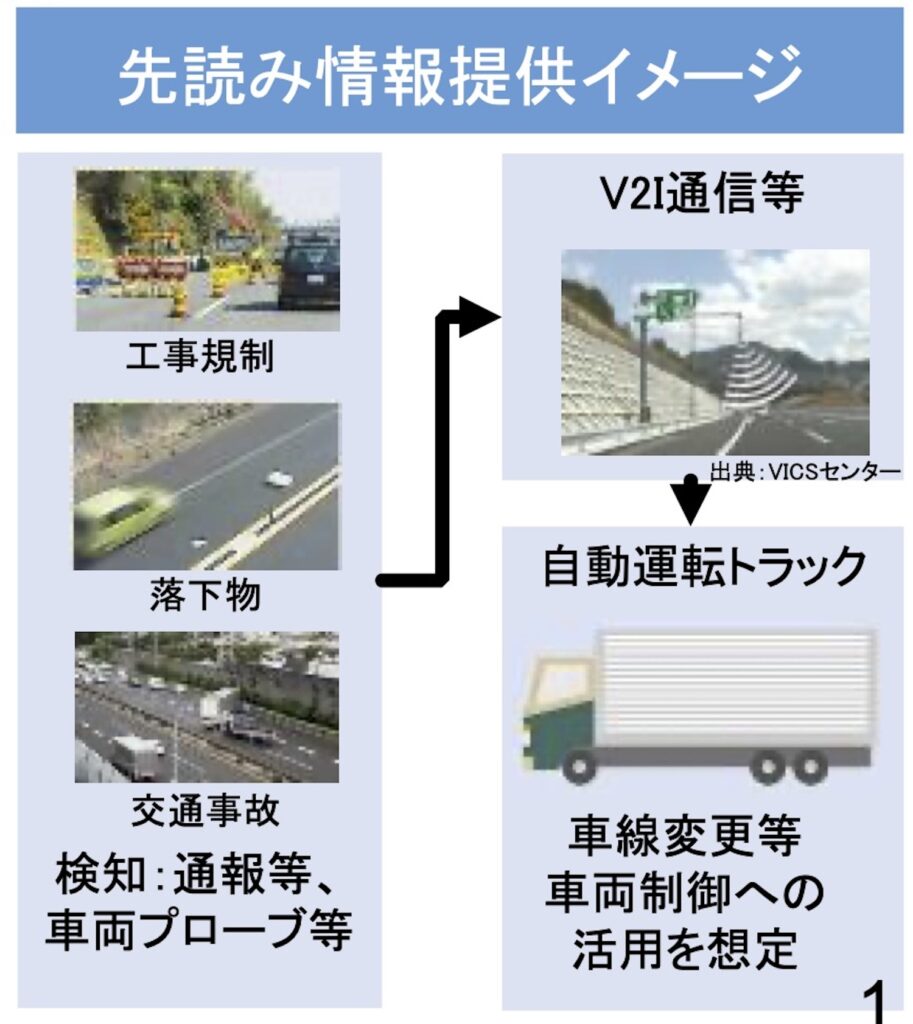
車輌データによる落下物検知は、自動運転車自体がセンサーとなって交通管制センターへ情報提供する技術も開発されており、自動運転車もこうしたサービスに貢献する一端となることが分かっている。
道路と交通の管理については遠隔監視、運転手や保安要員の派遣などがあり、自動運転を実現する上でも必要な人材確保が求められることが分かる。
有人と自動運転の切替拠点や自動運転車優先レーンについては、NEXCO中日本のSAの駐車マスの確保や本線上の整備が主となる。
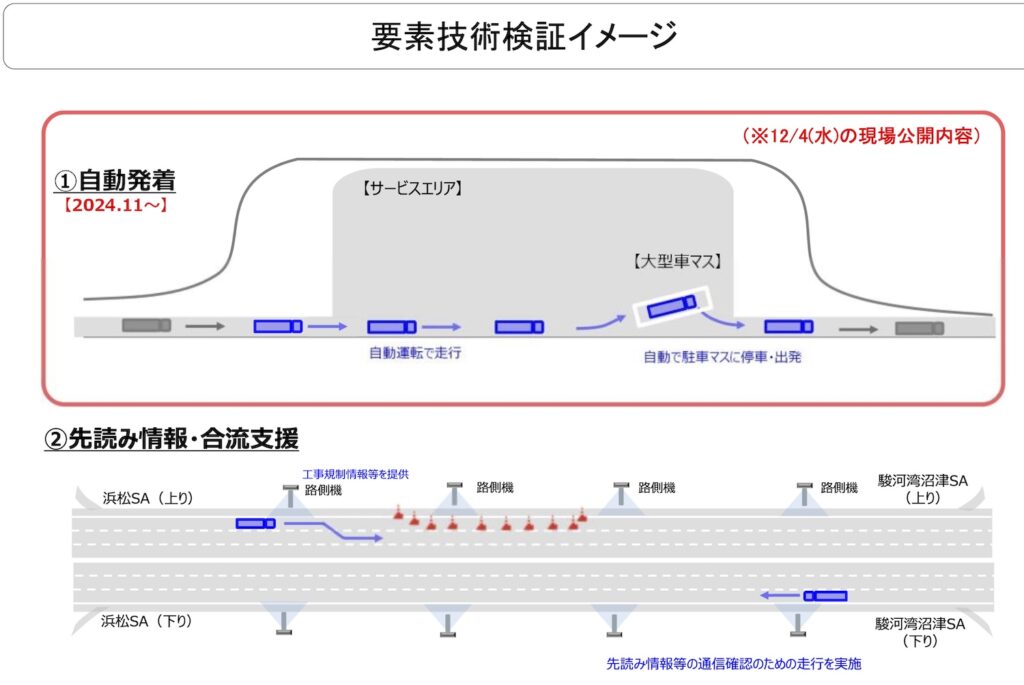
今年度はまず自動発着確認で、自動運転トラックが自動駐車・自動発進できるかの確認を行う。同時にインフラ整備を進め、次いで12月からは先読み情報提供システムの実証実験を開始する予定だ。
これは工事規制情報等の先読み情報について、路側機から送信された情報が適切に受信できるかを現地にて通信確認を行うもの。
さらに1月以降に合流支援情報提供システムの実証実験が開始される計画だ。これは自動運転車の本線合流を支援する情報提供システムについて、路側機から送信された情報が適切に受信できるかを現地にて通信確認を行うもの。
そして2025年度にかけて本線上に自動運転車優先レーンを設定し、自動運転サービス支援道の実証実験を開始する計画。いよいよレベル4の自動運転トラックが日本の公道上を走ることになる。
コミュニティバスではすでに無人運転が開始されているだけに、今後開発を加速させていくことを期待したい。